空-壁两栖桥检机器人是具有飞行-吸附-爬行功能合一的桥梁检测机器人,主要目的是抵近检测混凝土外观病害,特别是混凝土裂缝,以较低分辨率识别裂缝位置、宽度和分布。该款机器人由哈工大重庆研究院韧性交通中心开发,目前已申报发明专利30+项、实用新型专利20+项。预计2024年末实现桥梁裂缝检测,完成1.0版本的开发。
方案对比
当前桥梁检测的主要痛点之一为可达性不足,即大多数桥梁跨径检测无法实现全面覆盖。虽然若干技术手段已经应用致力于改善这一问题,但仍存在抵近能力不足、病害定位不精确、不能切换作业面等问题。
桥检车

- 桥检车一定程度上拓展了工程师的可达空间,但受限于梁下登高能力不足,工程师无法充分抵近病害部位,致使仍有大面积区域无法检测;
- 桥检车悬臂结构长度有限,也限制了工程师工作范围;
- 桥检车悬臂结构在强风作用下会产生剧烈振动,对工程师生命安全造成威胁;
- 桥检车需占道作业,严重影响交通;
- 桥检车费用较为昂贵,致使无法高频使用。
旋翼无人机

- 旋翼无人机极大拓展了工程师的可视范围,但为避免与结构相撞,无人机与结构之间需保留足够的安全距离,从而限制了无人机的抵近距离;
- 由于拍摄距离较远,无人机拍摄画幅较大,通常是一个笼统的结构区域。在这个区域中无法准确定位病害位置和范围;
- 为准确获取裂缝图像,通常需配置较高清晰度摄像头。高清图像虽然可以展示裂缝,但像素过高,会导致存储量过大,无法应用于实际检测工作。
负压吸附机器人

- 负压吸附机器人已于近年应用于检测行业,优点是实现了抵近检测,但其自重较大,吸附可靠性不足;
- 负压吸附机器人不能切换作业面,仅能在一个平面工作;
- 负压吸附机器人不能跨越障碍拼缝错台
更多介绍
关于更多现有桥检自动化方案见这里。
能力优势
-
高空壁面吸附
- 可代替人工实现高空壁面吸附,实现检测、甚至轻量化检修。
-
抵近观测
- 相对于旋翼无人机,空-壁两栖机器人可实现抵近观测,准确定位病害;
-
跨越障碍,切换作业面
- 相对于负压吸附机器人,空-壁两栖机器人可通过反复吸附-脱离切换作业面,可在平面和立面之间切换,适应桥梁复杂的结构构造;
- 空-壁两栖机器人可实现障碍跨越,对于梁间错台、拼缝错台等空隙均能平稳越过;
-
准确定位病害
- 由于是抵近检测,照片拍摄同时可确定拍摄位置,继而确定病害位置。为准确表达、统计提供了基础条件。
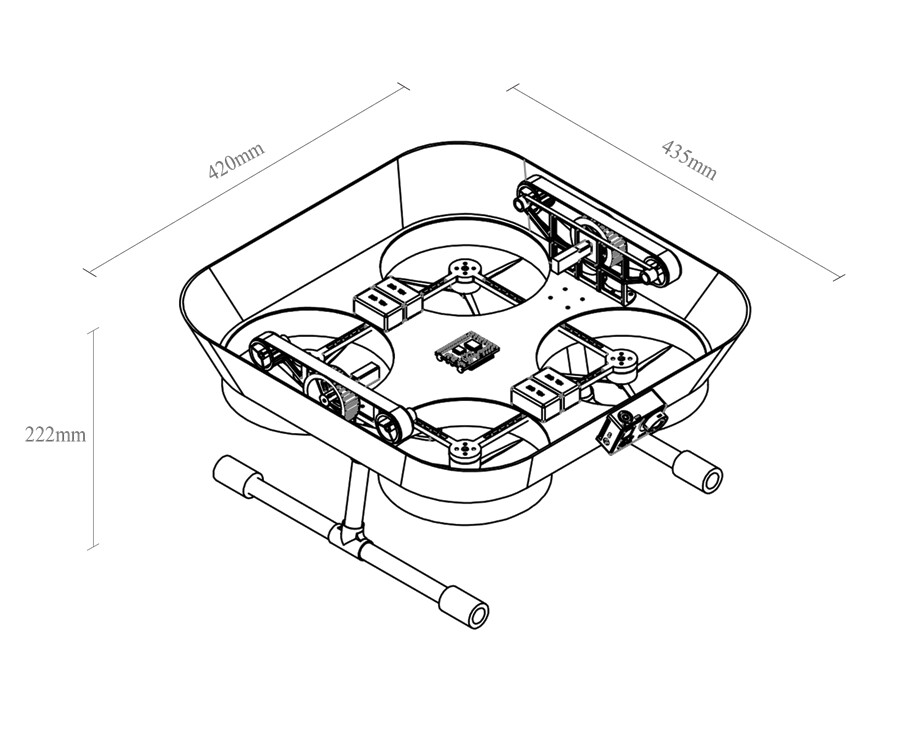
空-壁两栖机器人机械原理
飞行-吸附-爬行是空-壁两栖机器人的核心机械能力。本节将说明这一机械能力的原理。

-
空-壁两栖机器人通过精确控制各螺旋桨的扭矩,以调整飞行方向。同时,通过调节各螺旋桨的拉力大小,实现在空中的各向飞行移动;
-
吸附状态中,螺旋桨可视为轴流负压风机,将在负压腔内形成稳定的负压。空-壁两栖机器人依靠螺旋桨推力和负压腔的吸附力共同维持吸附;
-
吸附状态下,空-壁两栖机器人通过履带机构进行爬行;
-
空-壁两栖机器人通过控制螺旋桨的停转或反转,实现从吸附状态脱离,回到飞行状态。
低功率吸附原理
空-壁两栖机器人在悬停状态下的功率约为 720 W,而在吸附状态下,功率需求降低到仅需 330 W。这种显著的能效优化源于空-壁两栖机器人对天花板效应和负压效应的巧妙利用。
天花板效应:当螺旋桨靠近天花板时,会产生更大的推力。这种现象被称为天花板效应。空-壁两栖机器人通过涵道和负压腔优化绕流环境和静压分布,可以进一步增强这种效应。
空-壁两栖机器人由天花板效应获取的螺旋桨推力增益约为 25 % 。
由实验测试,获取非天花板效应范围内电机功率与螺旋桨推力的关系:
| 飞行动力系统功率 | 单电机功率 | 螺旋桨测试拉力 T_{OCE} |
|---|---|---|
| 300 W | 75 W | 0.27 kg |
| 700 W | 175 W | 0.54 kg |
-
当前机体吸附状态螺旋桨推力 T 共:
T = T_{OCE} \times 125\% \times 4 = 1.35 \ \text{kg}其中,由天花板效应获取的螺旋桨推力增益共:
T_{OCE} \times 25\% \times 4 = 0.27 \, \text{kg}
负压效应: 在负压腔内,吸附状态会形成稳定的负压,从而在负压腔的上下表面形成较大的压强差。这种压强差有效地分担了螺旋桨的工作负载,进一步提高了机器人的能源效率。
-
负压效应是空-壁两栖机器人在吸附状态下,功率需求大约为飞行状态一半的主要原因。
-
负压腔相关基础数据如下:
腔内负压 \Delta P 负压腔等效面积 S 350 Pa 0.0392 m^2 则吸附状态下,负压腔推力 F 约为:
F = \frac{S \times \Delta P}{g} = 1.4 \, \text{kg}螺旋桨推力:负压腔推力:
T : F = 1.35 : 1.4 \approx 1 : 1机体总推力为 2.85\, \text{kg} ,机体总重量为 2.32\, \text{kg} ,冗余推力约为 0.43 \, \text{kg} ,用于生成履带摩擦力及维持稳定。
研发合作
目前机器人正在开发中,欢迎对该产品感兴趣的企业加入到研发团队中,提供更多的经费和资源加速该项技术走向成熟。与我们共同投入、共享回报。
在桥梁检测之外,空-壁两栖机器人在更多场景中亦能发挥作用,包括:
- 高楼结构检测
- 高楼玻璃幕墙清洗
- 水坝检测
- 核电站冷却塔检测
- 斜拉桥主塔检测维修
上述场景可定制开发,以课题或项目形式合作。
- 李冬冬
- 150-8673-9828
- 哈工大重庆研究院韧性交通基础设施中心
更多视频信息见视频号:

其他