基于多旋翼无人机的桥梁巡检方案- 桥梁无人机巡检方案 (riebotech.com)
本文概要:
桥梁无人机巡检方案
- 作者:Riebo
- 发布日期:2023/08/24
1、概述
我国是一个桥梁大国,被誉为世界桥梁之乡,拥有超过100万座桥梁,拥有最先进的桥梁建设技术和丰富的高难度桥梁建设经验。但同时,我国的桥梁也存在危桥数量高居不下、桥梁垮塌时有发生、桥梁安全形势严峻的现状。交通运输部公路科学研究院的研究显示,我国公路桥的危桥占比超过10%,平均使用30年需要大修或重建。因此,如何更加科学、高效地对桥梁进行管养、维护和应急救援也成为了现阶段交通工作的重中之重。
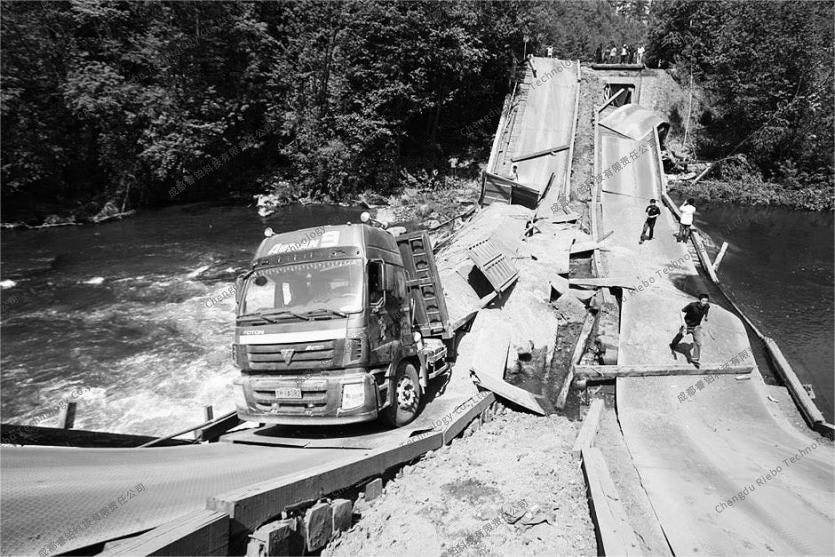
桥梁垮塌事故
目前,我国大部分桥梁检测工作仍然是传统的人工检测,主要依靠桥梁检测车、登高车等设备提供作业平台,人工接近检测部位通过肉眼进行检测。人工检测的方式主要存在以下问题:
(1)检测人员因技术原因、个人经验、责任心等因素易造成误检、漏检和错检;
(2)对于高桥墩、桥塔或桥检车无法达到的桥梁构件等区域,常规检测手段和方法存在局限性,可操作的难度非常大,存在检测盲区;
(3)巡检车租用成本高、效率低且存在安全风险;
(4)数据获取不全面、影像数据质量差、定位及测量精度低;
(5)数字化、集成化程度低,成果不直观,对巡检结果的复查难度大。

人工桥梁巡检
随着国家经济水平的提升和基础设施建设进程的加速以及技术创新能力的不断增强,各行业巡查监测的技术手段亦有大幅度提高。其中代表性的,就是在电力、林业、农业等领域内,无人机巡检技术的应用越来越广泛和深入。
但在桥梁巡检领域,无人机应用在整体上尚处于自发的、离散的、内生的状态,缺乏系统性顶层规划,未有效融入和支撑管理体系。从无人机应用技术的行业发展水平而言,桥梁巡检的无人机应用还处于起步阶段,与应用较为成熟的行业有不小的差距。因此,建设数字化、智能化、高效化的无人机桥梁巡检体系具有显著的必要性和迫切性。
基于这些情况,睿铂科技结合自身在无人机、可见光摄影测量、激光雷达方面积累的核心技术和大量全流程研发经验,开发了基于数字孪生技术巡检全流程系统,并推出了特有的无人机巡检方案。

无人机桥梁巡检
2、巡检方案
针对传统人工巡检的难点和痛点,睿铂科技的无人机巡检方案具有以下优势:
(1)无人机可以轻松抵达桥梁的各个部位,结合数字孪生仿真、全覆盖式巡检,解决人工巡检的遗漏和盲区问题;
(2)高分辨率巡检影像,结合AI识别、人工复核的方式,对于病害点的识别更加准确和全面;
(3)民用无人机市场成熟,学习成本、使用成本和维护成本都很低,且操作简便、部署灵活、作业高效,单人单机即可完成巡检作业;
(4)高精度自定位技术无人机搭载专业级巡检相机,可以获取病害的高清影像和空间位置,病害测量精度可达毫米级;
(5)数字孪生技术结合巡检管理系统,对病害数据进行三维可视化的展示与分析,为科学、高效地管理和运维提供更加准确、更加全面的依据。
方案具体的流程为:第一步,通过建立实景三维模型实现巡检对象的数字孪生;第二步,依据实景三维模型规划巡检航线;第三步,无人机按照巡检航线采集高分辨影像数据;第四步,对影像数据进行定位定姿处理;第五步,AI病害识别;第六步,通过通途智慧巡检管理系统对病害点进行三维可视化的浏览、管理、统计、分析并形成巡检报告。

巡检方案
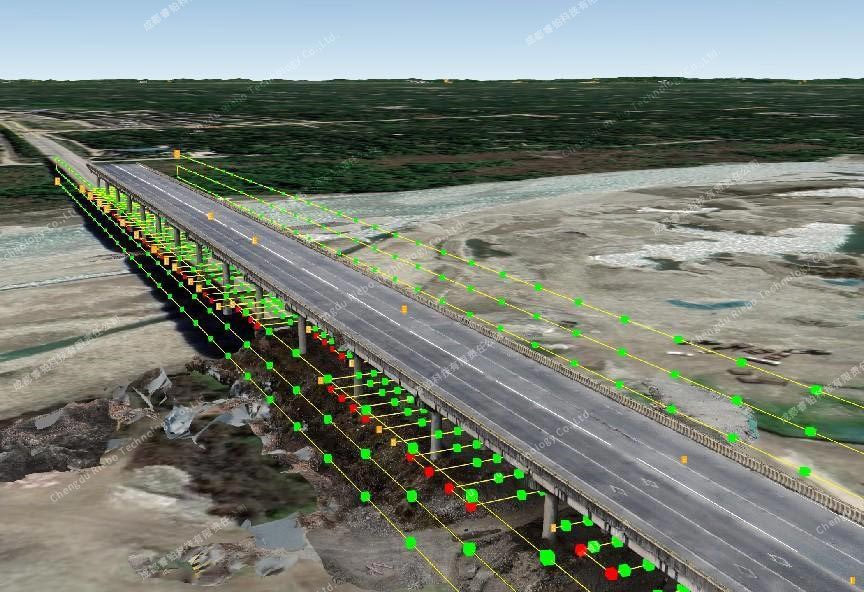
2.1、数字孪生
在第一次进行桥梁检测时,通过建立实景三维模型实现桥梁的数字孪生,还原桥梁的真实情况,还原精度可达到厘米级。

桥梁三维实景模型(整体)

桥梁三维实景模型(局部)
三维实景模型主要用途有2个:
(1)三维实景模型可以做为病害数据三维可视化管理的数字底图,对于所有已识别的病害,通过模型来进行展示和管理,让运维管理人员可以更加直观地研判桥梁的真实情况;
(2)三维实景模型可以做为巡检航线规划的依据,实现无人机全自主飞行。
针对桥梁的结构和特征,睿铂科技结合自身的技术和经验,选择了旗下M系列产品,并在自主研发的航线规划软件Riebo Route Assistant(RRA)中设计了巡检模块,专门用于桥梁的三维实景建模,在确保空三通过率和模型质量的基础上,大量减少航线和航片数量,从而大幅提高建模效率。
经过实际测试,一座500米长的桥梁,数据采集仅需17分钟,生成三维模型仅需94分钟。
2.2、航线规划
无人机巡检不同于普通的无人机航测作业,根据相关的检测标准,最严格的要求是需要检测出宽度达到0.1mm的混凝土裂缝,因此巡检时无人机需要贴近检测对象进行摄影,为了保证无人机在复杂环境中的飞行安全,且为了确保影像对检测对象的完整覆盖,因此需要进行航线规划,让无人机按照航线自动完成巡检作业。
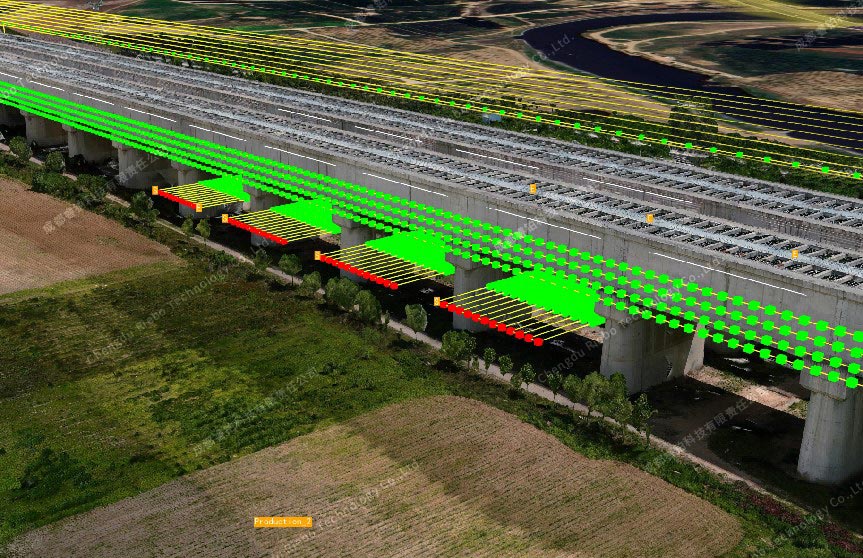
Riebo Route Assistant(RRA)航线规划软件中的巡检模块,可以根据实景三维模型自动生成仿真航线,平均5分钟即可完成一座桥的航线规划,结合上文中的快速建模技术,可以实现对一般场景的首次巡检在一天内完成建模和巡检。
自动生成巡检航线
2.3、数据采集
巡检影像数据采集工作由无人机搭载相机完成,外场作业仅需一人、一车和一套采集设备即可完成,并且算法优化后的航线设计搭配长焦距、中画幅的专业级巡检相机,作业效率非常高。经测试,500米的多跨桥,外场巡检作业仅需约90分钟。

外场巡检作业
2.4、数据处理
数据处理使用睿铂全系相机配套的Skyscanner软件,该软件可以分架次或分批次导出巡检数据,从而实现海量巡检数据的有效化管理。同时,该软件还可以将地理位置信息写入照片中,实现高精度的坐标矫正,并根据无人机和相机的姿态信息,解算出影像的视场域,为后续病害点的精准定位提供数据支撑。
2.5、AI识别
随着基于卷积神经网络深度学习的图像识别算法的进步,使用高分辨率巡检影像进行病害点人工智能识别的技术应用也更加容易和成熟。具体的工作流程如下:
第一步:通过对采集图片数据进行标记并交付给卷积神经网络模型进行训练。训练后的神经网络模型可快速地对图片进行裂缝识别检测,后期通过完善模型和采集更多训练数据来共同提高模型的识别率。
第二步:针对已经识别出缺陷的图片,进行增强、去噪、图像分割、边缘检测等一系列处理,得到裂缝分割效果图和裂缝像素级的测量结果。采用基于深度学习的优化分割算法,裂缝像素级重叠率高,并且能够在细小裂纹、复杂背景、人为标识等干扰情况下给出正确的分割结果。
同时针对桥梁的其余缺陷,如钢结构焊缝开裂、锈蚀、螺栓松动、脱空等情况也进行识别。
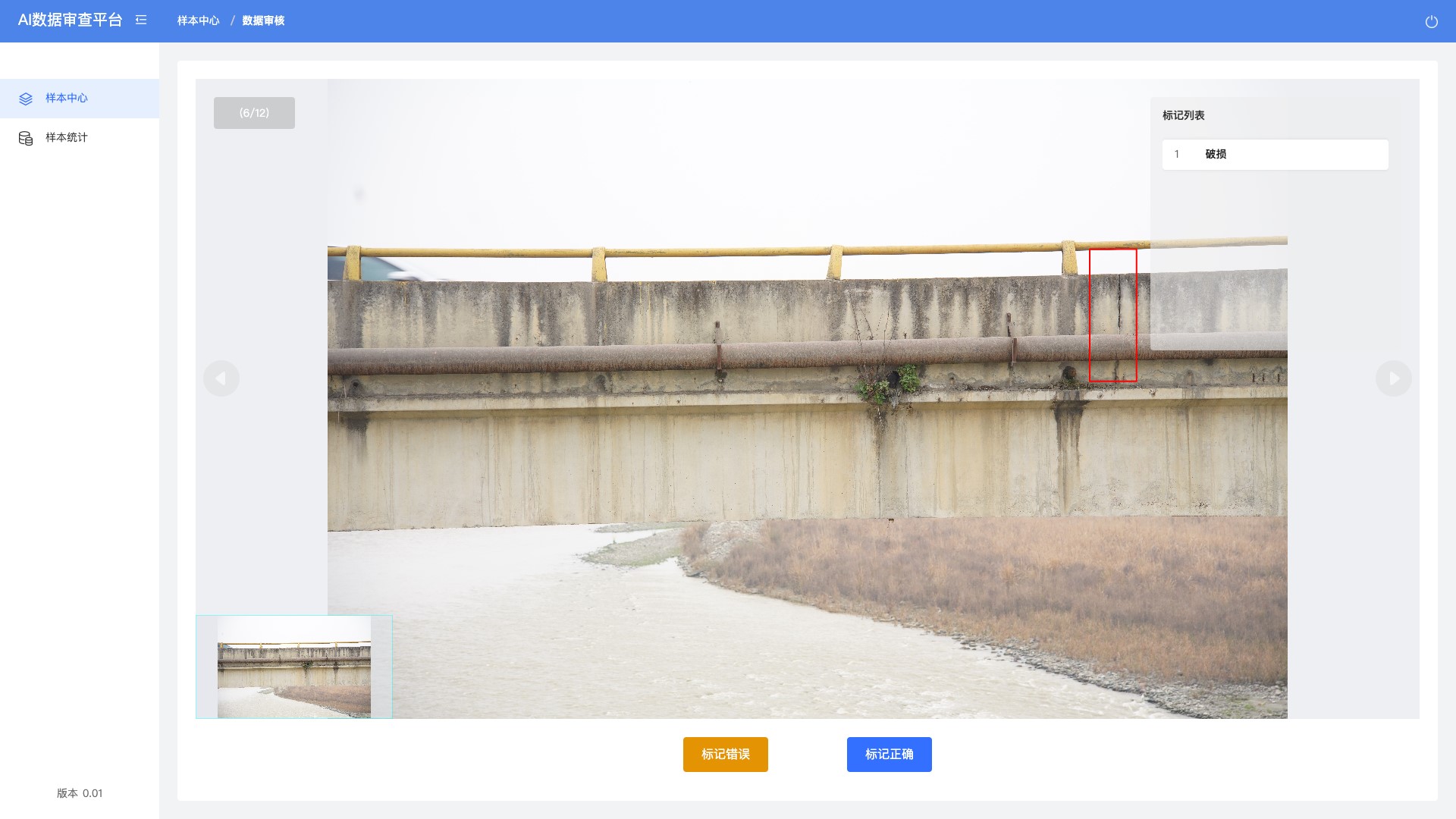
AI识别系统
2.6、巡检管理
目前,大部分的检测作业最终形成的成果为检测报告,无论是从具体的病害,还是桥梁的整体情况,其呈现方式均不直观。并且,巡检流程缺乏有效的数字化管理,巡检成果的可重复利用率低,巡检过程的监督检查困难,现有的部分巡检作业软件也存在集成化程度低、数据成果不通用的问题。
为此,睿铂科技开发了通途智慧巡检管理系统,将巡检全流程进行数字化一站式管理,集成了人员管理、数据管理、病害识别、病害定位、病害三维可视化管理、历史病害对比、数据统计分析、巡检报告定制化输出等功能。
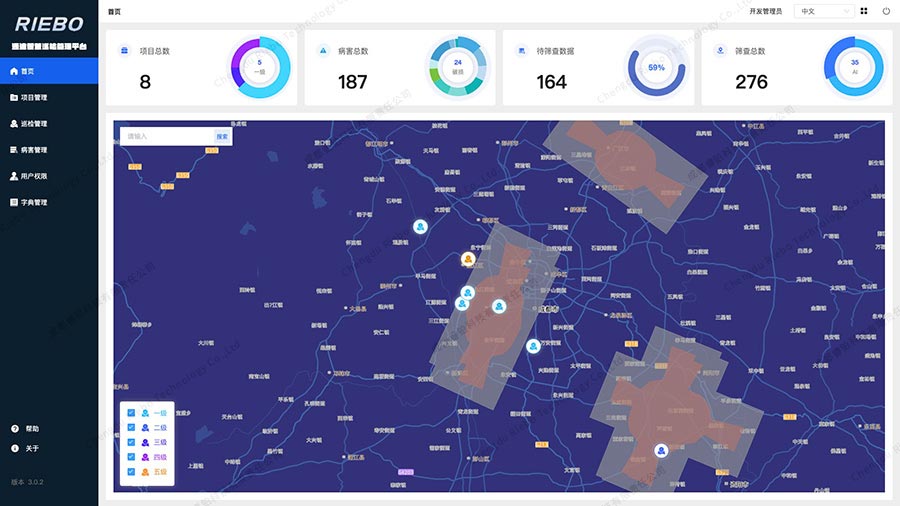
通途智慧巡检管理系统
3、巡检系统
整个系统由采集系统和管理系统2个子系统组成。其中:采集系统由无人机平台、建模相机、巡检相机、航线规划软件和数据处理软件构成;管理系统为通途智慧巡检管理系统。
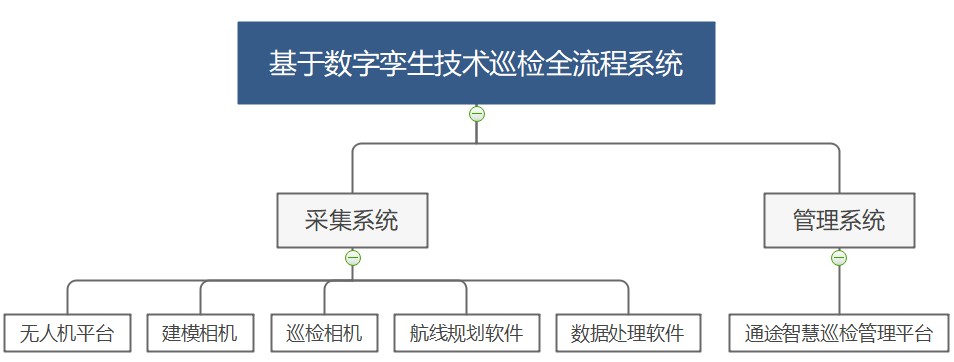
巡检系统
3.1、采集系统
采集系统主要通过无人机平台搭载云台相机,配合相应软件,完成对巡检对象的高精度位置信息、高分辨率影像数据和各构件病害数据的采集。系统包括:
(1)无人机平台
无人机平台为大疆M300RTK多旋翼无人机。该款无人机内置了RTK模块,支持自定义网络RTK,可以实现高精度准确定位。其飞行稳定的特点,六向环境感知和避障能力非常适合桥梁巡检的复杂环境。

M300RTK
(2)建模相机
建模相机使用睿铂旗下的M系列产品。M系列相机是睿铂自研的单镜头量测型相机,主要的使用场景为倾斜摄影测量、近景摄影测量、立面建模、正射影像获取等。系列包含M4Pro、M6/M6pro、M10Pro、M15Pro等多款行业高端产品,画幅为全画幅和中画幅,焦段覆盖18mm到75mm,均采用了睿铂的专利技术MLE镜头和MLS快门。
MLE镜头采用了非球面镜片,在控制镜头体积的情况下,同时采用了超低色散ED镜片,修正、消除慧差型成像,有效控制色差,把镜头畸变控制到千分之三以内,相比传统摄影测量镜头,匹配点数量综合提升了约10%~20%,并且重投影误差RMS能够减少约20%。
MLS快门是睿铂针对航测相机专门研发的一款机械无畸变快门,不同于传统摄影测量相机的机械卷帘快门会导致运动畸变、使用寿命短、低温环境下容易结冰等缺点,MLS快门具有质量轻、体积小、孔径大、无运动畸变等优势。

M10Pro相机
(3)巡检相机
针对巡检作业的特点,睿铂还专门优化了图像算法,采用了更加合理的测光模式,在桥底边缘光线条件对比强烈的区域也不会出现曝光不足的情况。
长焦距可以在保证空间分辨率的情况下,增加无人机和巡检对象的相对距离,从而适应各类复杂情况,确保飞行安全。

实拍影像效果
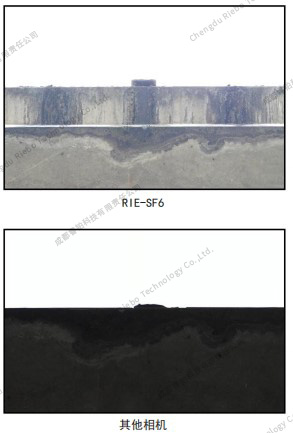
桥梁边缘测光对比
(1)航线规划软件
Riebo Route Assistant(RRA)是睿铂自研的一款航线规划软件,除了支持睿铂全系列设备的网格、环绕、仿地、立面四大类航线规划功能外,还支持自主导入DEM高程文件并自动识别高程类型,以及三维模型一键导入并自动对齐底图地物的功能。
RRA的巡检模块,支持依据三维实景模型自动生成巡检航线,航线各项参数均可调节,在保障飞行安全的基础上,实现对巡检对象的全覆盖、无遗漏。通过算法优化的航线设计,还能大量减少冗余数据,为后续处理工作节省时间。

RRA航线规划软件
依据模型生成渡槽巡检航线
(2)数据处理软件
数据预处理使用Skyscanner软件,软件支持自动架次分组的数据管理功能,支持通过标定参数,将位置信息精准矫正至相机cmos中心并写入照片,并且支持结合相机畸变参数和拍照时的姿态信息,精确计算照片的视场域,为后续病害点的精准定位与测量提供数据支撑。
空三和建模软件目前的市场已经很成熟,有多款软件可以根据客户的需要自由选择。

Skyscanner
4、巡检行业发展趋势
随着大数据、移动互联网、人工智能、无人机等技术的不断发展,国家高度重视新技术在交通运输行业的应用和融合创新,对公路养护和运营管理也提出了更高的要求,在国家战 略的引领下,部级及省级部门对人工智能、自动驾驶、无人机等技术在交通运输中的应用提出了发展目标和指导意见,地方政府也相继发文引导此类课题研究与应用推广,国家政策导向和地方政府的务实推进,将大力推动无人机技术在公路巡检监测中的应用,提高公路养护效率、安全保障和服务水平,推进公路养护现代化,并催生巨大的经济效益。